量子重力梯度仪技术原理与研究现状
地球重力场是由地球系统物质属性产生的一个基本物理场,其分布由地球内部物质密度决定。地球重力加速度和重力梯度都会随空间位置变化而变化。重力梯度是重力加速度随空间的变化率,其测量值还会受到地球自转、潮汐以及空气阻力等因素的影响。
高精密重力梯度测量对资源勘探、地球科学研究以及国防建设等具有重要意义。在资源勘探方面:当前我国处于对能源和矿产资源需求高速增长的阶段,通过分析重力梯度信息可以有效地计算出矿产分布,提高勘探效率;在地球科学研究方面:重力梯度信息可应用于地球内部构造和板块运动、地壳形变、地震预报等研究领域;在国防建设方面:重力梯度信息是非常重要的基础资料,在现代化的武器装备中,无论是洲际导弹还是中短程导弹,重力梯度参数都对保证目标命中精度具有决定性的作用。
此外,高精度的惯性导航系统主要依赖于重力场模型和补偿精度,使用重力梯度仪和惯性导航相结合的方式是一种理想的解决方案,基于重力梯度仪实时测量重力梯度,为惯导系统提供重力补偿信息,从而消除垂线偏差所产生的水平速度误差和姿态误差,以满足载体高精度长航时导航的需求。
量子重力梯度仪是利用超低温原子团代替惯性质量来感应重力作用,并结合激光与原子团的相互作用,使原子所处叠加态的相位与运动路径中受到的重力加速度相关,通过探测原子的内态布居数来获得重力加速度信息。量子重力梯度仪也可以测量绝对重力梯度,理论上不存在漂移,并且不易受测量区域环境的影响。
目前,国际上已经研制出的原子重力梯度仪样机的数量保守估计应该在 20~30 台。依据不同的任务目标,这些原子重力梯度仪可划分为研究型和实用型: 研究型的原子重力梯度仪是以服务于基础物理研究为目标,这些基础物理研究以万有引力常数 G 的精密测量为代表,这一类型的样机以达到更高的测量精度为导向; 实用型原子重力梯度仪则以满足实用化的需求为目标,这一类型的样机在保证一定测量精度的前提下,也同样注重于解决样机在集成化、可靠性等方面的问题。
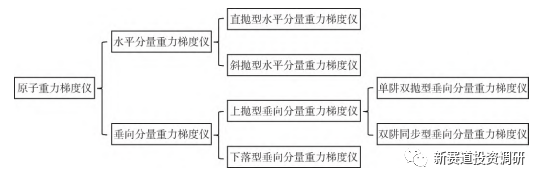
与按照任务目标的分类相比,按照物理方案和物理结构的分类更有助于对原子重力梯度仪的深层次理解。如下图所示,根据宏观的物理结构, 原子重力梯度仪可分为测量重力梯度垂向分量的垂向原子重力梯度仪和测量重力梯度水平分量的水平原子重力梯度仪。垂向重力梯度仪又可以根据原子落体方式划分为上抛型垂向重力梯度仪和下落型垂向重力梯度仪,而上抛型的垂向重力梯度仪又可以根据物理结构的不同划分为单阱双抛型垂向重力梯度仪和双阱同步型垂向重力梯度仪。与垂向原子重力梯度仪不同,目前所有的水平原子重力梯度仪均为上抛型,但又可以根据上抛方向的不同分为垂直上抛型水平原子重力梯度仪和斜抛型水平原子重力梯度仪。
(1)水平分量原子重力梯度仪
目前所有的水平原子重力梯度仪均为上抛型,主要原因在于水平原子重力梯度仪中操作原子的拉曼激光与原子的飞行轨迹垂直或近似垂直,因此在原子的自由落体过程中需要多个空间分离的拉曼激光束才能完成对原子的操作。而上抛型水平原子重力梯度仪对激光束的需求数量为 2 个(下方激光束在上升和下落过程中各与原子作用一次) ,下落型水平原子重力梯度仪对激光束的需求为 3 个,由于原子相干性的保持对拉曼激光光束间的平行度有很高的要求,因此较少的拉曼激光束数量更有助于获得更好的原子相干性。
2008 年,美国斯坦福大学研制出国际上首个可搬运的水平原子重力梯度仪并搭载车载平台用于户外实地测量。
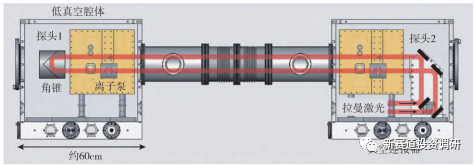
2009年,美国斯坦福大学基于前一版水平重力梯度仪中的窗片缺陷和空气扰动所带来误差和噪声以及探头体积过大从而难以适配传统惯性稳定平台的问题,开发出如图3所示的新一代重力梯度仪。
中国科学院精密测量科学与技术创新研究院 (简称中科院精密测量院,原武汉物数所) 是国内最早开展原子干涉仪及应用技术研究的单位。团队 于 2006 年和 2010 年分别研制出国内首台原子干涉仪和国内首台原子重力仪原理样机,并于 2014 年和 2015 年分别研制出国内首台水平原子重 力梯度仪和双阱上抛型垂向原子重力梯度仪原理样机。2021 年,在第一代原理样机的基础上,进一步研制出如图3所示的可移动水平原子重力梯度仪工程样机并通过了车载测试。该样机采用了与斯坦福大学二代样机相似的斜抛构型,但创新地采用了玻璃-金属复合真空腔体,即利用了玻璃 腔体的大通光孔径提升了物理系统的集成度,又通过金属管道保证了两个干涉仪之间足够的基线长度以及连接的可靠性。

(2) 垂向分量原子重力梯度仪
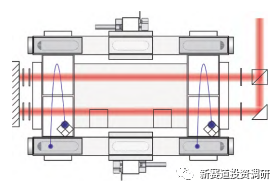
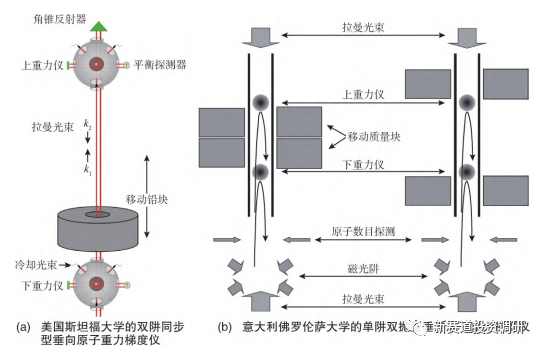
重力梯度张量矩阵中包含有 5 个独立分量,其中垂向分量是最具实用价值的重力梯度分量,因此在国际上针对垂向原子重力梯度仪的研究最为广泛。垂向原子重力梯度仪根据原子落体方式可划分为上抛型垂向重力梯度仪和下落型垂向重力梯度仪,其中下落型具有更加简洁的光、电单元和更高的鲁棒性,而上抛型则可以在有限的物理尺寸内实现更长的自由落体时间从而获得更高的测量敏感性。1998 年,美国斯坦福大学研制出国际上首个原子重力梯度仪,这是一个如图 4(a) 所示的由上下两个独立的原子干涉仪组成的双阱同步上抛型原子重力梯度仪。双阱同步型重力梯度仪中的两个原子干涉仪基于两个磁光阱同步抛出的两团原子,可以更快地完成冷 原子的制备,从而以更高的灵敏度实现重力梯度的测量。
意大利佛罗伦萨大学是另一个较早开展原子重力梯度仪技术研究的单位,研究团队于 2006 年研制出如图 4(b) 所示的单阱双抛型垂向重力梯度仪。单阱双抛型重力梯度仪中的两个原子干涉仪基于同一个磁光阱先后抛出两团原子,该方案具有更简洁的物理系统和更少的光、电通道需求, 同时对于非零水平速度所带来的测量误差也具有更好的共模抑制效果。
由于每个原子干涉仪都需要时间来制备一定数目的冷原子,而冷原子数目的多少取决于装载时间的长短又决定了原子干涉仪的量子投影噪声极限,因此单阱双抛型重力梯度仪普遍采用 “juggle”过程来实现两团冷原子的制备: 即首先在足够长的时间内利用磁光阱制备足够多的冷原子,然后将该冷原子团 1 以尽量高的初速度上抛,并利用冷原子团 1 上升、下落的时间段在磁光阱内完成冷原子团 2 的制备; 在冷原子团 1 即将落回磁光阱之前,再将制备完成的冷原子团 2 上抛,随即再利用磁光阱将下落的冷原子团 1 俘 获并再次上抛。前两次上抛的时间间隔较长,便于冷原子团 2 的制备,而后两次上抛的时间间隔较短,仅用于保证两团原子在空间上分离的距离。第三次上抛时给与冷原子团 1 的初速度等于此时冷原子团 2 的向上速度(此时冷原子团 2 已经向上运动了一段距离并在重力作用下经历了一段时间的减速) ,由此可以获得两个运动速度同步但在垂向方向保持特定距离的冷原子团。
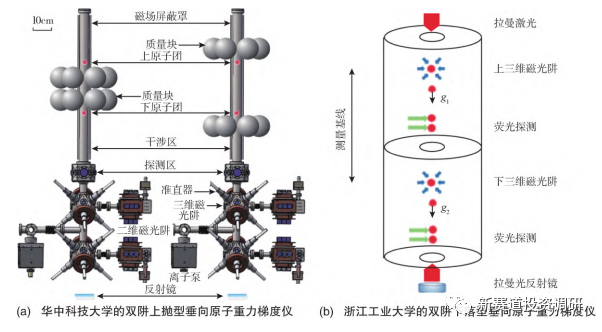
华中科技大学于 2021 年研制出用于万有引力常数测量的高精度双阱同步上抛型垂向原子重力梯度仪。如图 5 所示,尽管该重力梯度仪基于两个独立的磁光阱,但空间构型上却与传统的单阱双抛型重力梯度仪更为相似,两个干涉仪的干涉过程仍然在磁光阱上方的同一段真空管道内进行, 这不仅减少了冷原子制备的时间,提高了测量速率,而且对于磁场和引力源的控制也十分有利。
浙江工业大学团队也于 2021 年研制出可移动小型化双阱下落型垂向原子重力梯度仪并通过了车载测试。
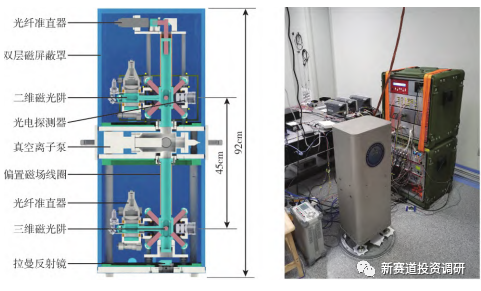
中科院精密测量院在近期也报道了一台高集成度绝对重力梯度仪,如图6所示,该重力梯度仪采用双阱同步上抛的方案以及玻璃材质的大光学孔径真空腔体,在尺寸仅为 37cm × 28cm × 92cm、体积仅为 92L 的物理系统内,实现了 45cm 的测量基线和 130ms 的原子自由演化时间并集成了用于原子预冷却的二维磁光阱。尽管该基线长度和落体高度(原子自由 演化时间) 仍然不利于获得很高的指标,但团队仍然通过一系列技术突破,实现了 160E /Hz 1 /2 的测量灵敏度,并经过17000s 积分使测量分辨率达 到 0. 9E 的水平。与伯明翰大学高 1. 87m 和 iXblue 公司高 1. 75m 的重力梯度仪相比,该重力梯度仪具有迄今最高的集成度,这为与现有惯性稳定平台技术的结合提供了极大的便利。此外,与前述仅完成了对重力梯度相对变化量进行测量的重力梯度仪相比,团队对该重力梯度仪进行了极为详尽的系统误差评估工作,并使其具备了绝对重力梯度的测量能力,该重力梯度仪测得本地重力梯度值为 3114E ± 57E。
近年来,量子重力梯度仪发展迅速。目前,量子重力梯度仪的灵敏度主要受限于测量过程中的各项噪声,包括测量点的地面振动噪声、拉曼光的相位噪声以及原子探测噪声等。有效地抑制这些测量噪声,是当前提升量子重力梯度仪灵敏度的主要研究方向。
未来,量子重力梯度仪会向着小型化、实用化并且可移动的方向发 展。可以对以下几个方面进行改进:1)设计更为紧凑的真空系统;2)体积和质量更小的电控系统;3)效果更好的隔振装置;4)更稳定的光路系统。